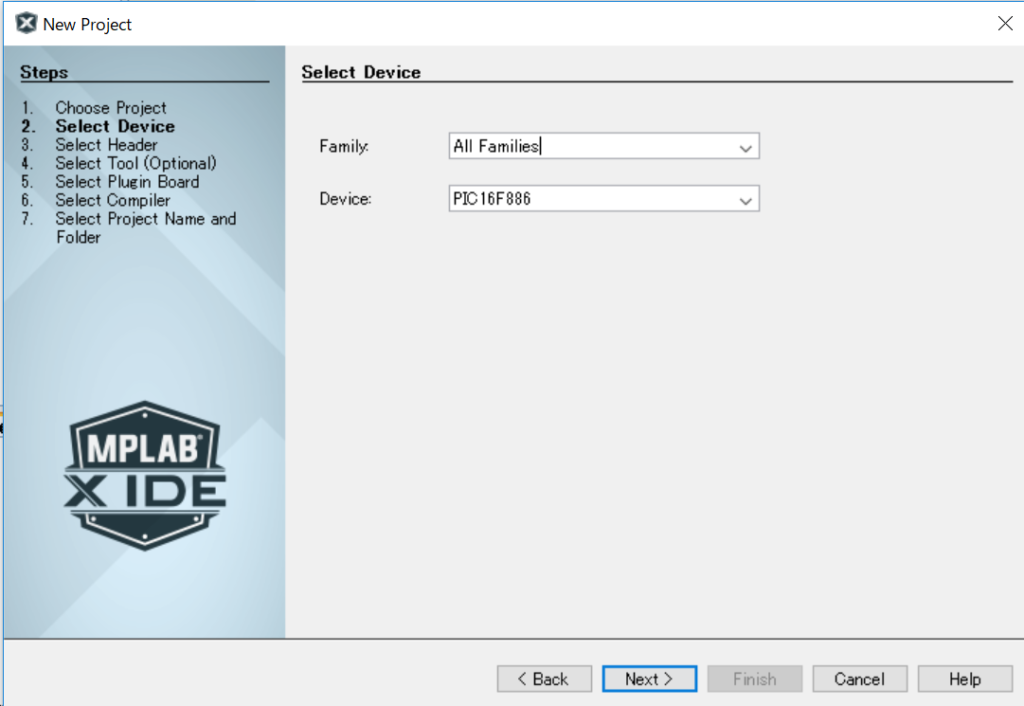
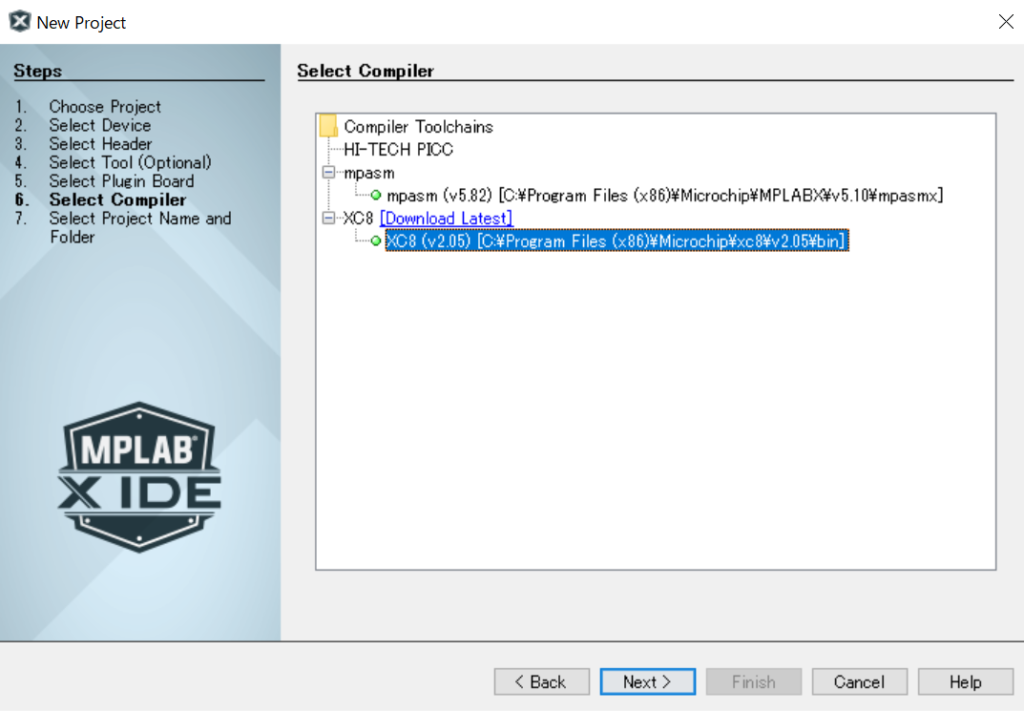
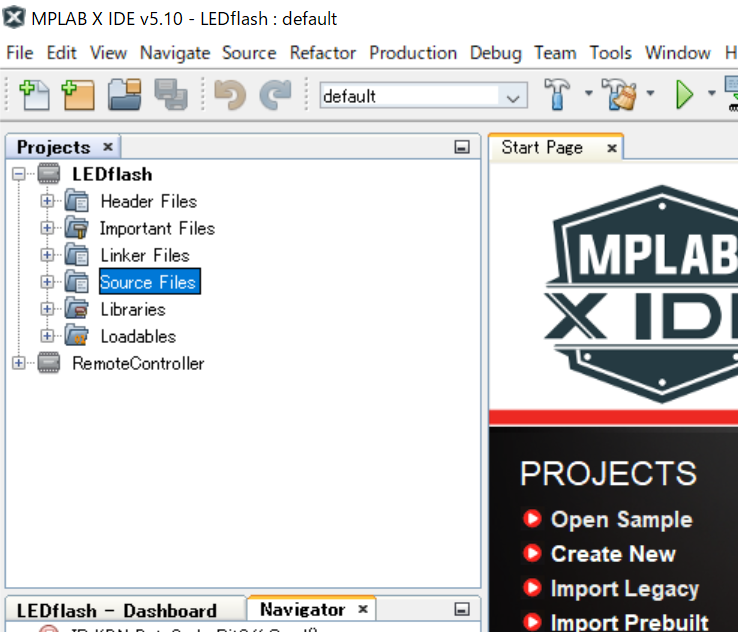
IDEは統合開発環境で、エディタ、デバッカ、シミュレータなどほとんどのプログラムを内蔵しています。MPLAB X IDEは8bit~32bitマイコンで共通で使用できます。 コンパイラはC言語のようなコンパイラ言語をコンパイルして機械語に翻訳するプログラムです。Cコンパイラは別にインストールし、MPLAB X IDE に統合します。
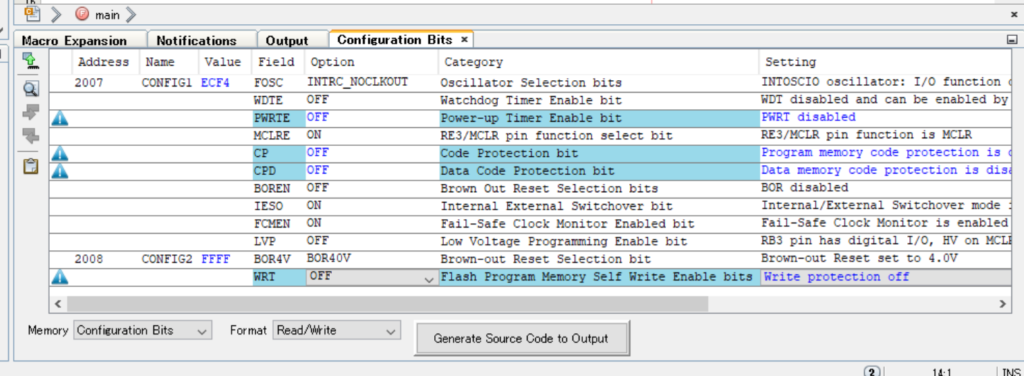
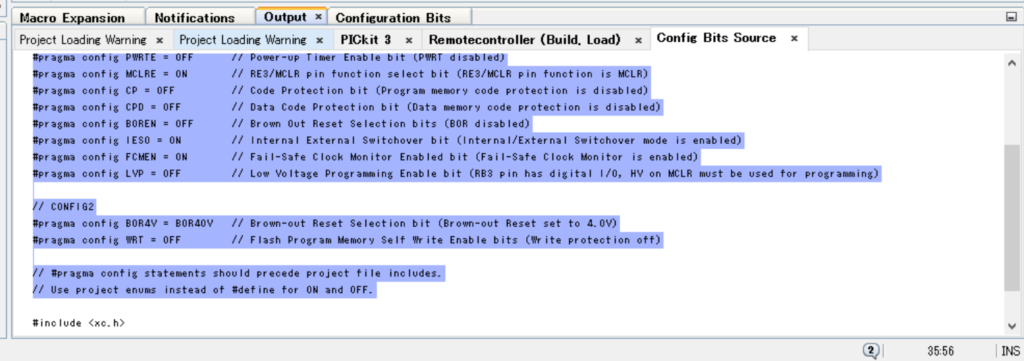
// CONFIG1
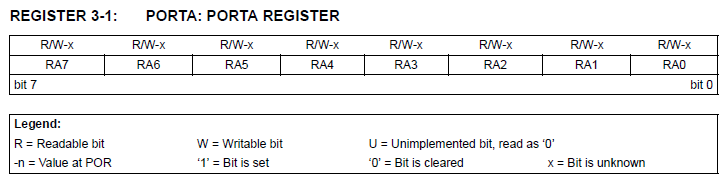
#pragma config FOSC = INTRC_NOCLKOUT // 発振回路設定 Oscillator Selection bits (INTOSCIO oscillator: I/O function on RA6/OSC2/CLKOUT pin, I/O function on RA7/OSC1/CLKIN)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled and can be enabled by SWDTEN bit of the WDTCON register)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // 外部リセット/汎用入力の選択で外部リセット有効化 RE3/MCLR pin function select bit (RE3/MCLR pin function is MCLR)
#pragma config CP = OFF // Code Protection bit (Program memory code protection is disabled)
#pragma config CPD = OFF // Data Code Protection bit (Data memory code protection is disabled)
#pragma config BOREN = OFF // Brown Out Reset Selection bits (BOR disabled)
#pragma config IESO = ON // オシレータのスタートアップとコード実行の潜在時間を最小化Internal External Switchover bit (Internal/External Switchover mode is enabled)
#pragma config FCMEN = ON // オシレータの故障の場合さえ、デバイスが作動し続けるのを許容するように設計Fail-Safe Clock Monitor Enabled bit (Fail-Safe Clock Monitor is enabled)
#pragma config LVP = OFF // Low Voltage Programming Enable bit (RB3 pin has digital I/O, HV on MCLR must be used for programming)
// CONFIG2
#pragma config BOR4V = BOR40V // リセットしきい値を4V Brown-out Reset Selection bit (Brown-out Reset set to 4.0V)
#pragma config WRT = OFF // Flash Program Memory Self Write Enable bits (Write protection off)
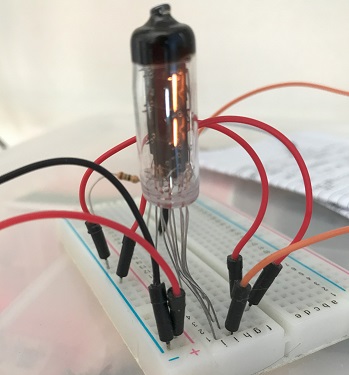
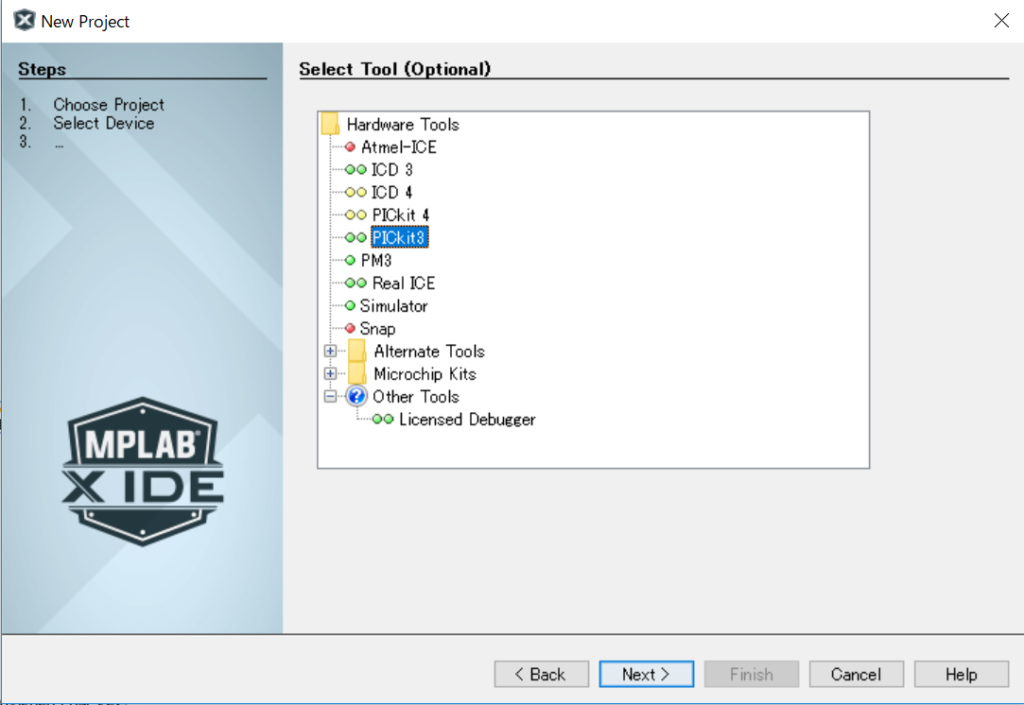
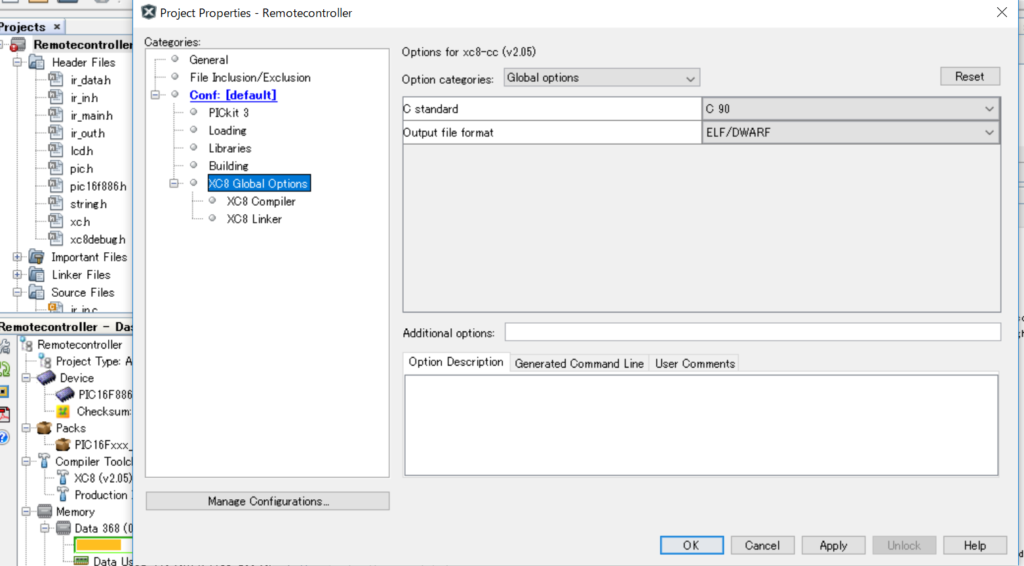
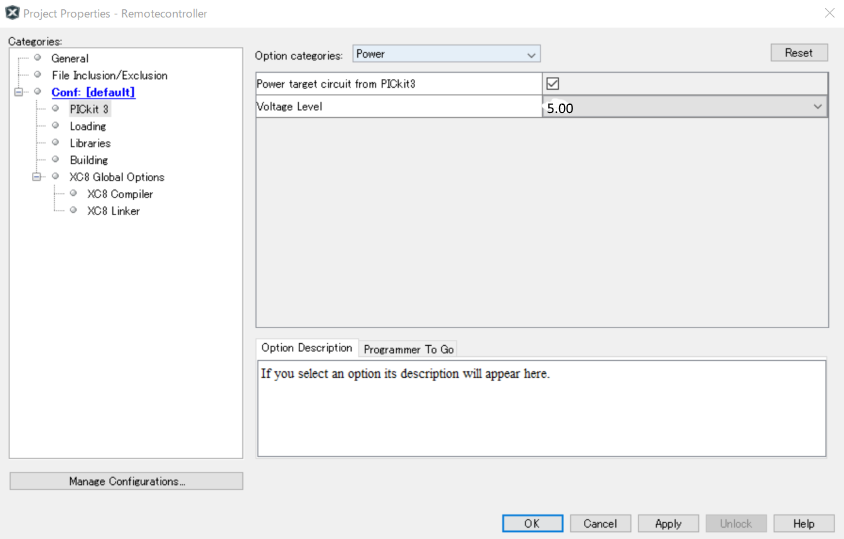
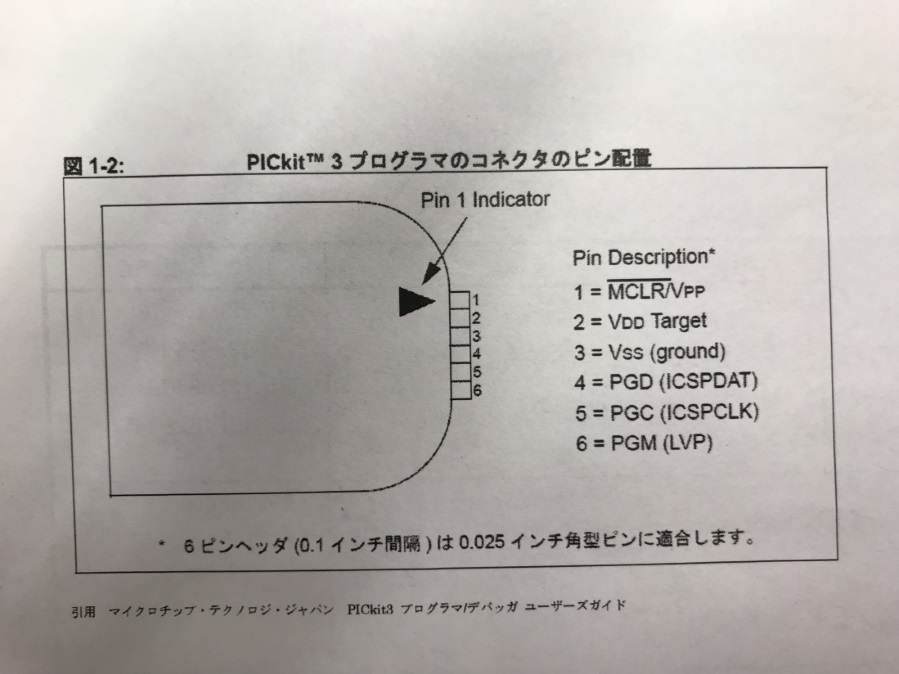
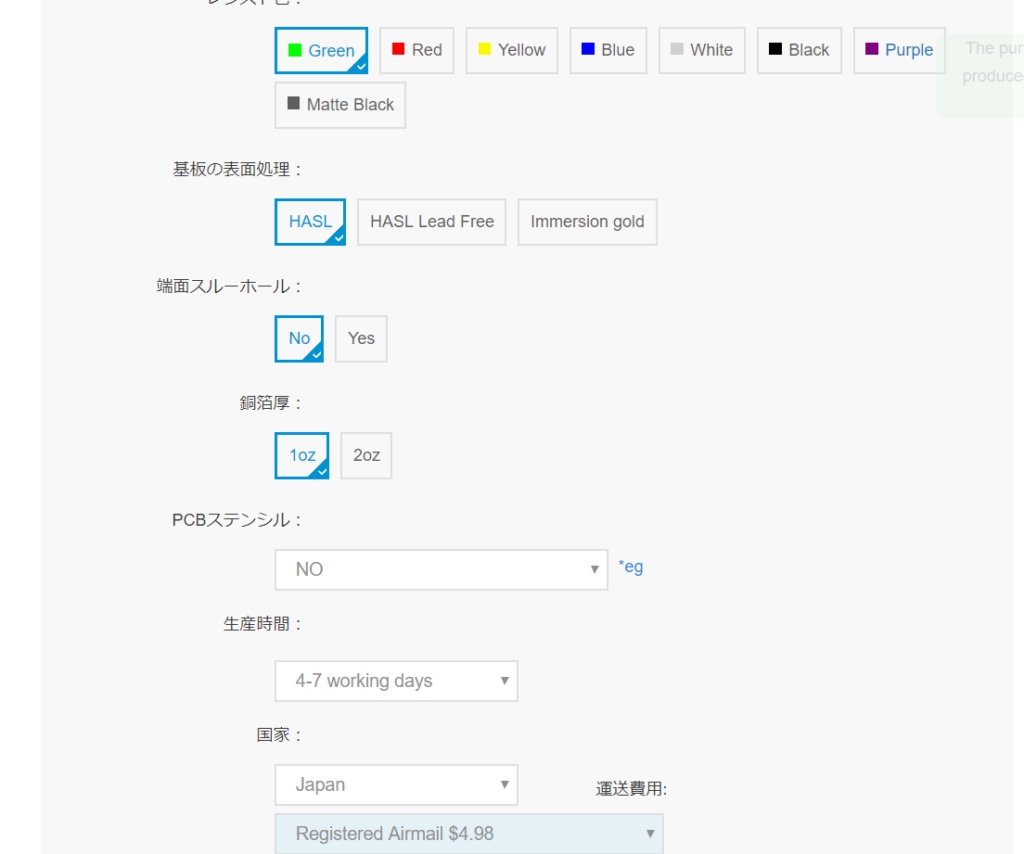
電源供給するように設定します(私のライターは安く買ったからか電源を供給する機能がうまくいきませんでした)。マイコンは電源がないと動作しませんので、ライターか回路から電源を供給して下さい。 project上右クリックでpropaties、hardware toolからPICkit3を選択、pickit3からpowerで、チェックボックスにチェック。マイコンのデータシートにWide Operating Voltage Range (2.0V-5.5V)とあったので、5.0Vの電圧を供給します。
PICkit 3 is trying to supply 5.250000 volts from the USB port, but the target VDD is measured to be 4.875000 volts. This could be due to the USB port power capabilities or the target circuitry affecting the measured VDD.
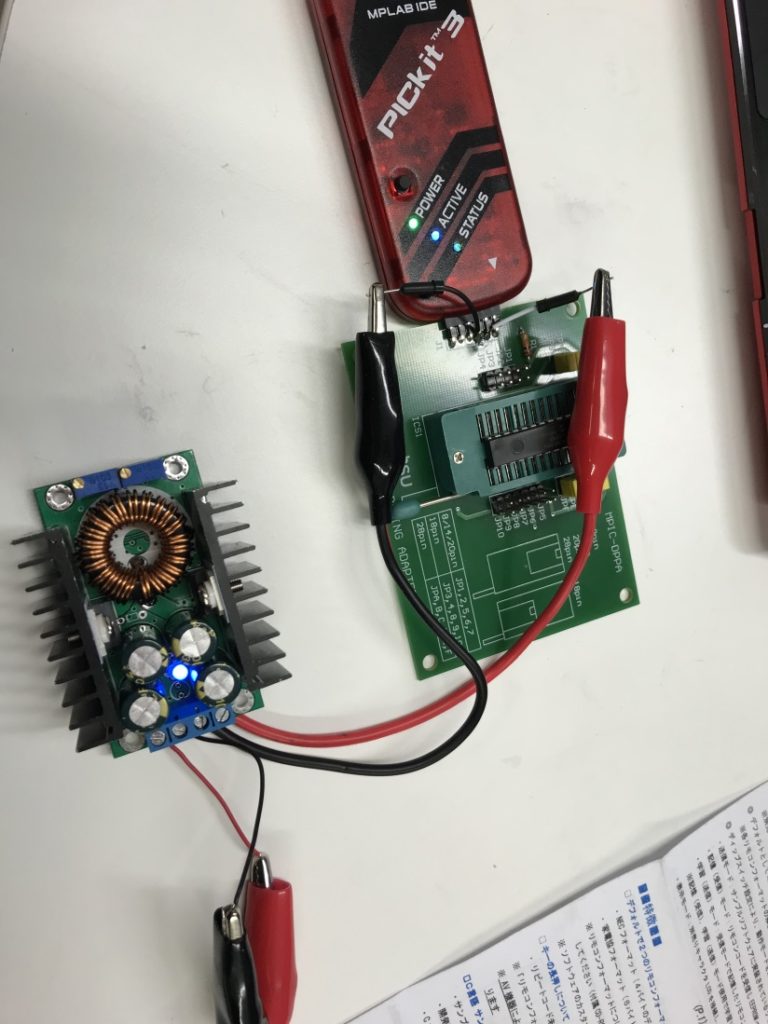
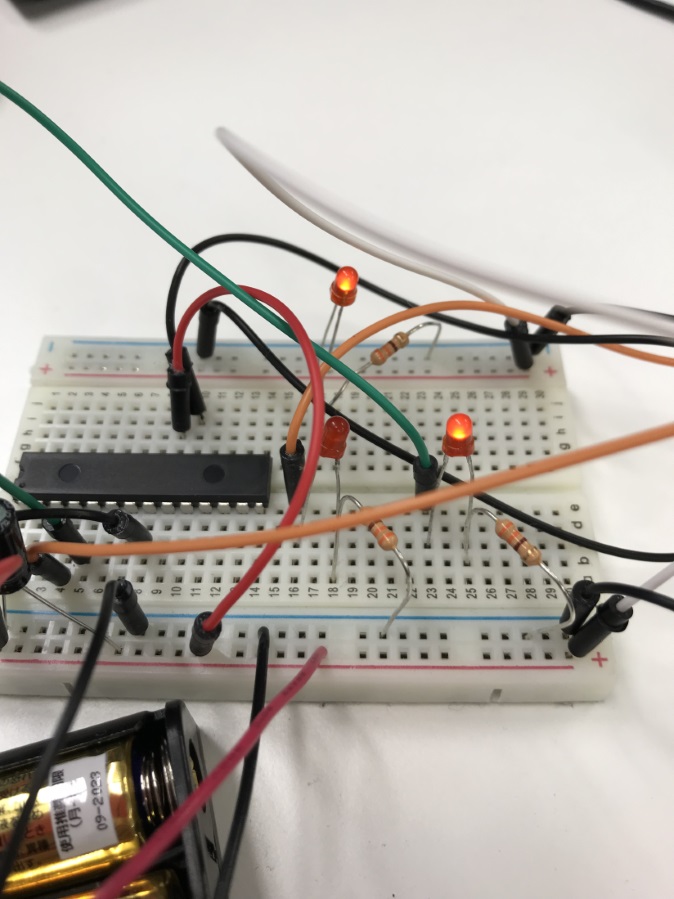
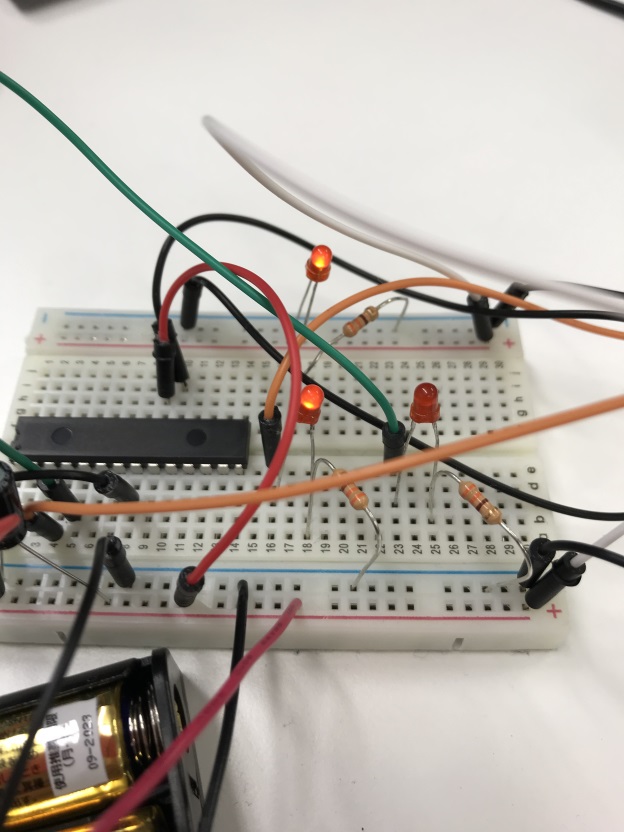
私はライターが壊れていたので、無理やり外部から接続できるようにしました。
Programming...
The following memory area(s) will be programmed:
program memory: start address = 0x0, end address = 0xfff
configuration memory
Programming/Verify complete
+--------------------------------------------------------------------+
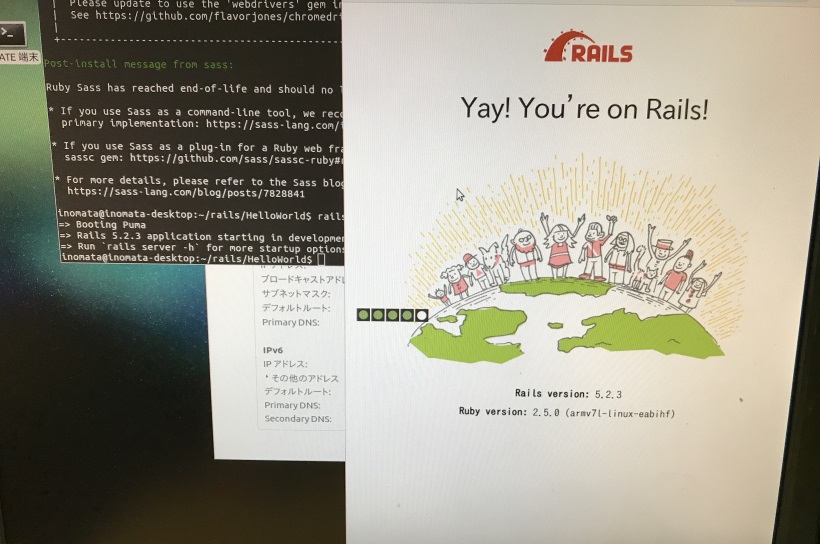
| |
| NOTICE: chromedriver-helper is deprecated after 2019-03-31. |
| |
| Please update to use the 'webdrivers' gem instead. |
| See https://github.com/flavorjones/chromedriver-helper/issues/83 |
| |
+--------------------------------------------------------------------+
rails/Gemfileを以下のように変更して、
group :test do
# Adds support for Capybara system testing and selenium driver
gem 'capybara', '>= 2.15'
gem 'selenium-webdriver'
# Easy installation and use of chromedriver to run system tests with Chrome
gem 'chromedriver-helper' => gem 'webdrivers' //ここ
end
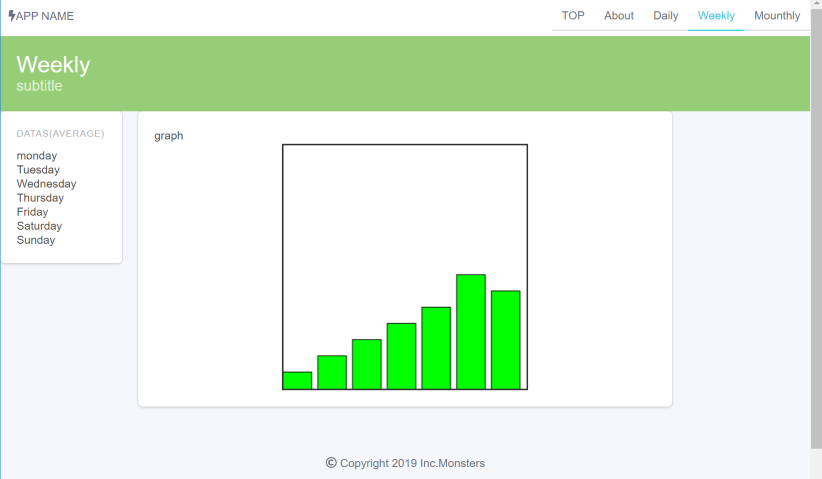
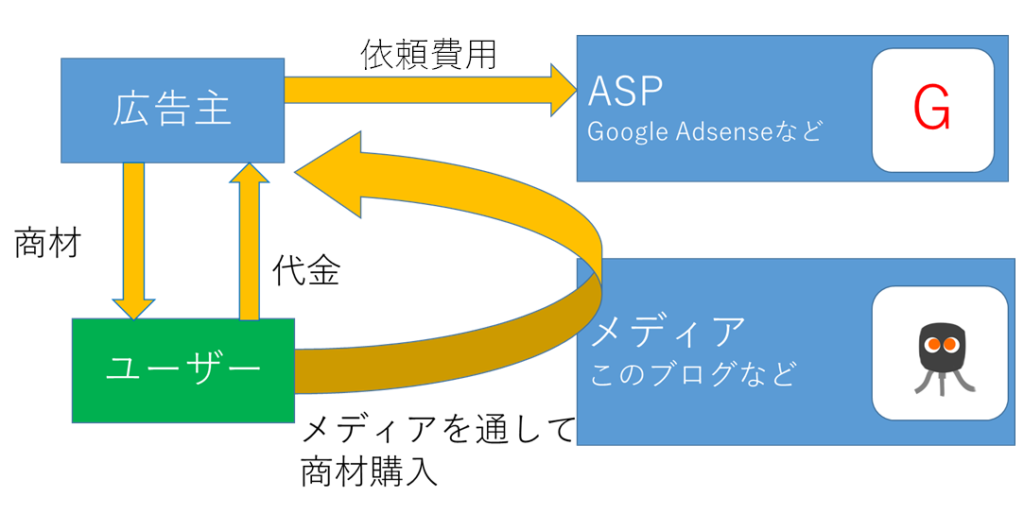
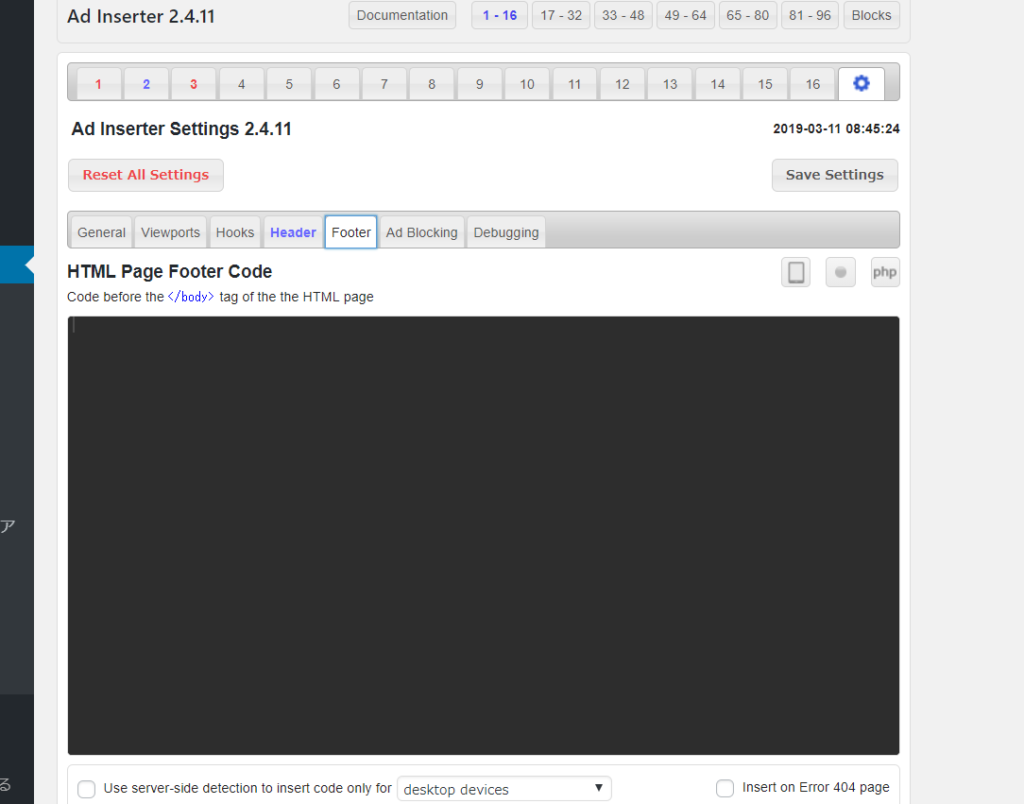
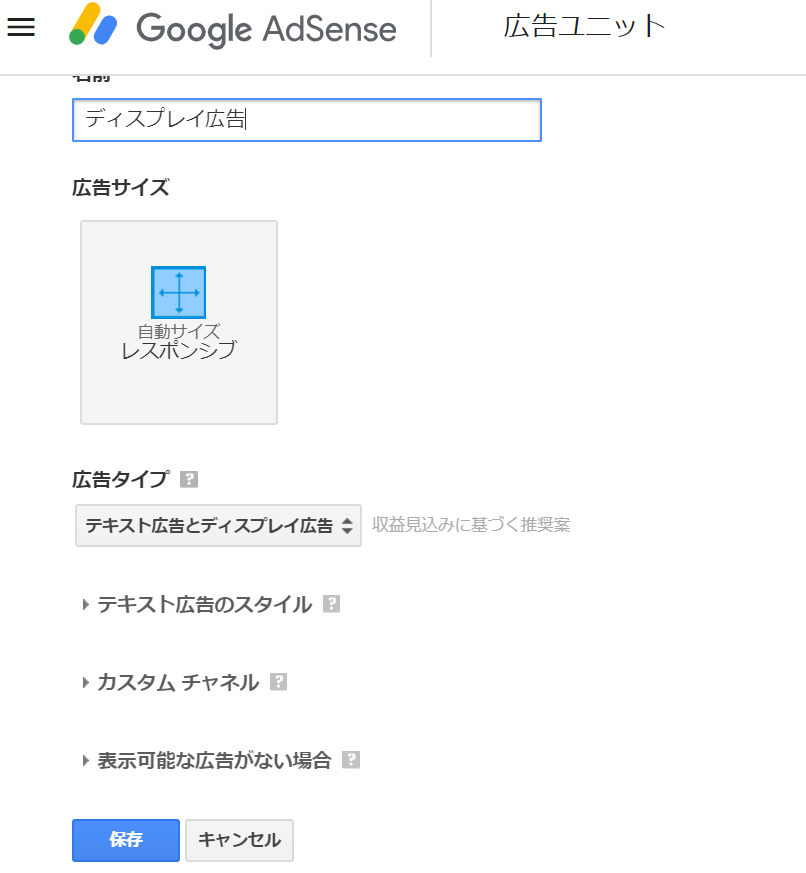
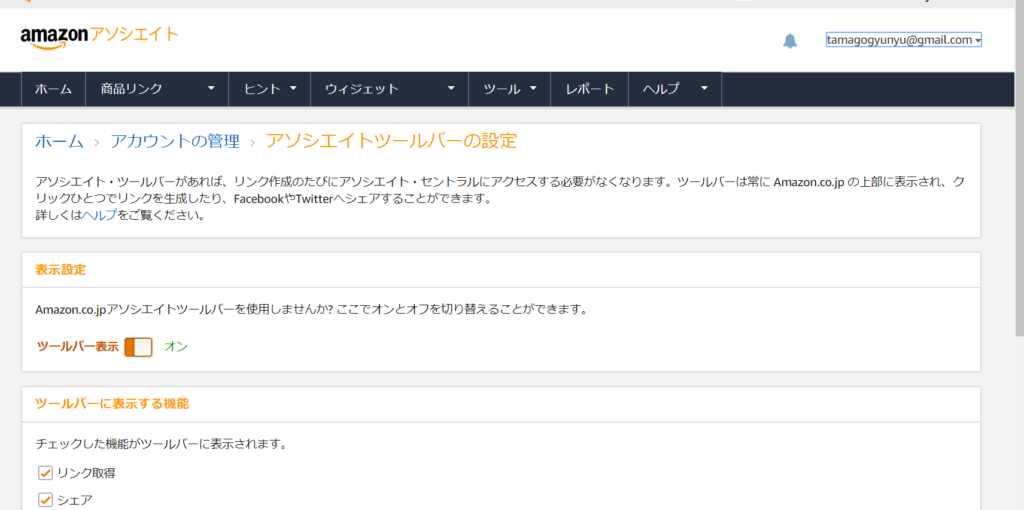
受かったら広告を貼っていきます。基本的にHTMLを書き加えるので、wordpress内部にカスタムHTMLとして挿入すれば表示はさせるはず、ですが正直毎回入れるのは面倒。なので、一括で全体に表示できる方法をやります。プラグインWordPress Ad Manager & AdSense Ads – Ad Inserterというのを使っています。
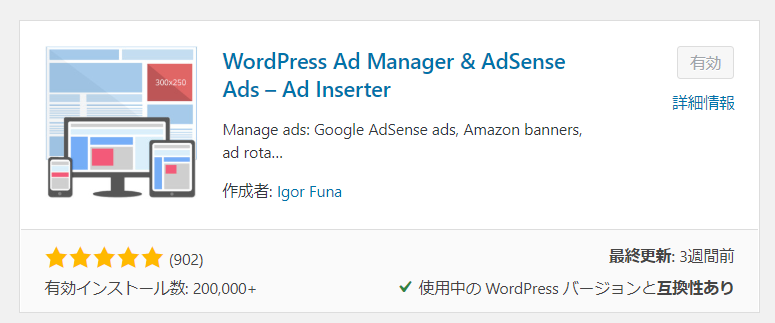
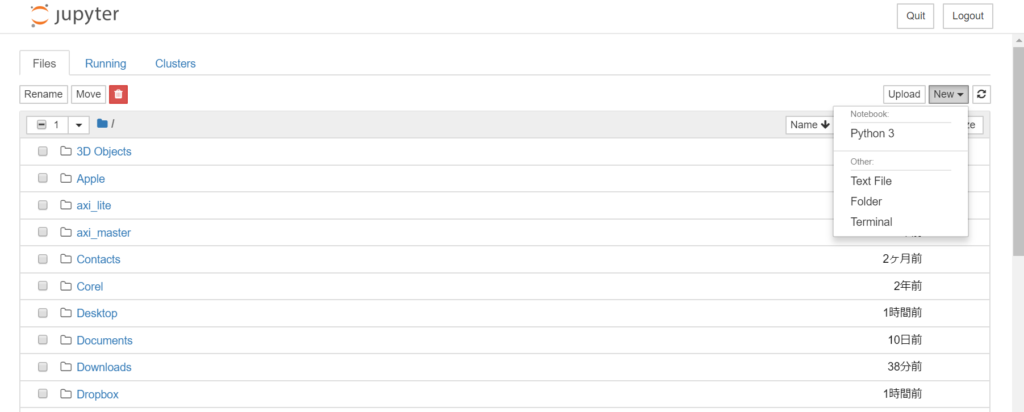
広告に限らず、PHPやHTMLをいじらないといけないことがよくあると思いますが、元コードに直接やって居るときに操作をミスすると突然全く動かなくなる、表示すらされなくなる事故が起きる危険がありますので、直接手を加えるのはおすすめしません。そこで登場するのがプラグインです。この Ad Inserter は、対応するタブにコードを書き加えるだけでheaderやfooterを編集できるので便利です。画像のプラグインをインストールして有効化します。
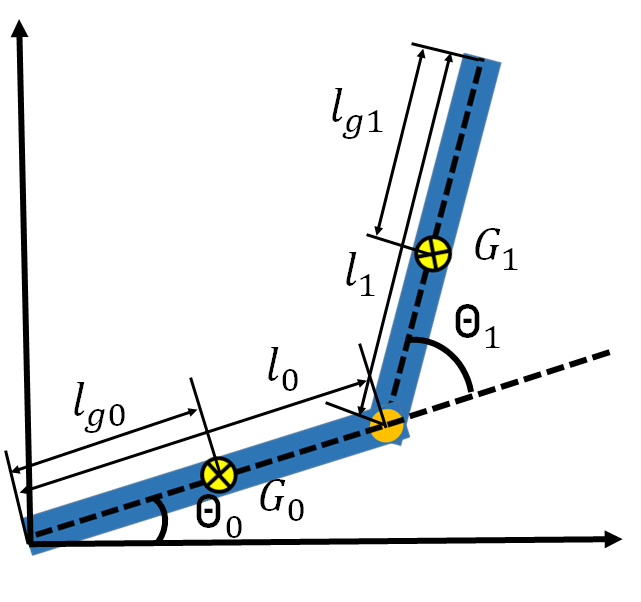
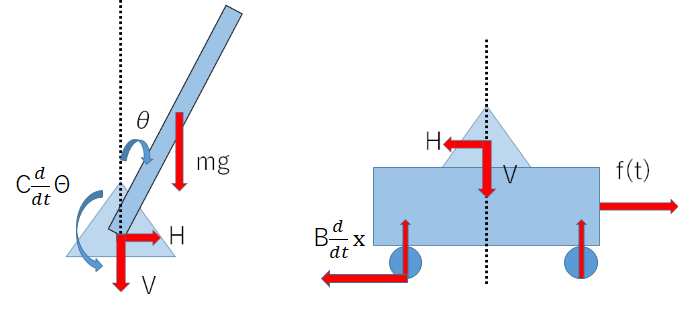
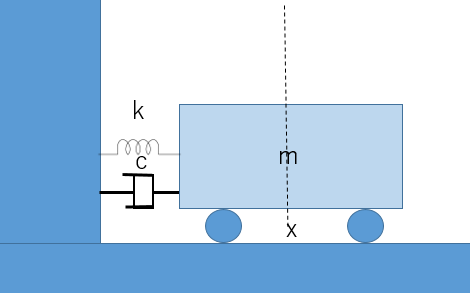
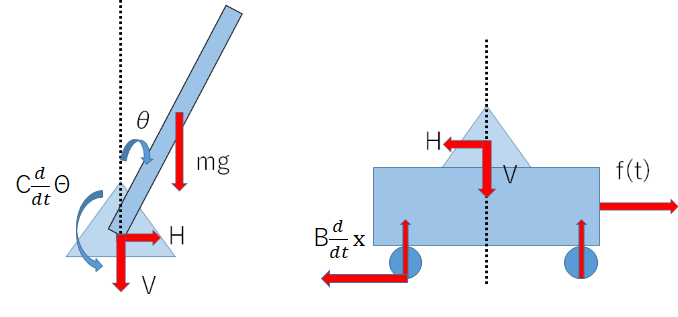
$$H = m \ddot x + ml \ddot \theta sin\theta - ml (\dot \theta)^2 sin\theta…(5) \\ V = -ml \ddot \theta sin \theta - ml(\dot \theta) cos \theta +mg…(6)$$